Comment un conducteur reprend-il en main son véhicule après une phase de conduite autonome ?

Crée le 01/04/20, modifié le 04/06/23
Augmenter encore et toujours la sécurité à bord des véhicules, est une noble cause qui anime nombre de chercheurs, industriels et autres institutions publiques.
La technologie a toujours été invitée, à bon escient, dans les véhicules, à la fois pour la sécurité passive : réduire les conséquences corporelles des accidents, et de plus en plus pour la sécurité active : réduire les causes d’accident.
Personne n'est parfaite...
Comme il est admis que les humains peuvent être sujets à des défaillances cognitives, sensorielles ou comportementales, en situation de conduite, les technologies récentes se proposent de renforcer sa capacité de pilotage (détecteur de distance, d’obstacle, de position, etc.) avec des alertes ou des assistances totales ou partielles, correspondant actuellement au niveau 2 d’automatisation sur une échelle de 0 à 5. L’argument premier pour l’émergence du véhicule autonome est en effet une augmentation significative de la sécurité lors des déplacements, en limitant les accidents d’origine humaine.
Les évolutions chaque jour plus impressionnantes de ces technologies laissent espérer des phases de conduite entièrement autonome (niveaux 3 à 5), c’est-à-dire des phases pendant lesquelles le véhicule se dirige sans action humaine.
...les voitures autonomes non plus !
Cependant, avant que les voitures ne soient vraiment autonomes, la supervision de la conduite sera partagée entre le conducteur et les systèmes automatiques (niveau 3), et ce partage n’est pas sans poser des problèmes spécifiques, en termes de facteurs humains. En effet, un trajet se fera en séquences alternées entre automate et humain avec des transitions homme/machine à optimiser, notamment en situation d’urgence, en gardant à l’esprit que même lors des phases autonomes de niveau 3, le conducteur devra être à même de superviser l’automate, rester conscient de son environnement de conduite, et être capable de reprendre la main à chaque instant.
Le temps de reprise en main, question centrale
La recherche conduite à Aix-Marseille Université et au CNRS, par les équipes de l’Institut des Sciences du Mouvement sous la supervision de Jean-Louis Vercher, s’intéresse justement à l’étude du comportement du conducteur lors de la reprise en main du véhicule après une phase de conduite autonome.
Le projet, soutenu par la Fondation MAIF et le groupe PSA, porte une attention particulière à la question du temps de reprise en main du véhicule après une phase de délégation de conduite plus ou moins longue. Ce temps de reprise en main dépend-il de la durée de la phase autonome ? Cette question est cruciale pour les constructeurs, car elle permet de déterminer l’anticipation avec laquelle le système autonome doit informer le conducteur de la nécessité de reprendre la conduite en mode manuel. Le consensus tourne actuellement autour d’une dizaine de secondes.
Le projet examine également la nature des actions (sur le volant, sur les pédales) menées par le conducteur lors de la phase de reprise, les caractéristiques cinématiques et/ou dynamiques de l’action de conduite (la trajectoire suivie par le véhicule, par exemple pour éviter un obstacle). Une analyse cruciale car elle est la seule à donner une représentation fidèle et compréhensive du comportement routier du conducteur. Elle permet de quantifier précisément les déviations (dans l’espace et dans le temps) par rapport à un comportement nominal et ainsi d’évaluer précisément la prise de risque. Le programme de recherche présenté ici se base essentiellement sur ce type d’analyse au cœur de l’expertise de l’équipe.

Figure 1. Exemple d'une séquence de saccades et de fixation au moment de la requête de reprise en main du véhicule. Avant l’apparition de la requête ; fixations 1, 2 et 3. Après l’apparition de la requête ; fixations 4 et 5.
L’attention, l’engagement, la vigilance, jouent un rôle déterminant dans la qualité de la reprise et leur niveau impacte directement la performance du conducteur. Le paradigme souvent utilisé pour tester ce point est celui de la double tâche qui révèle, dans ce contexte, une augmentation notable du temps de réaction lors de la demande de reprise en main. En outre, l’étude des mouvements oculaires montre que le conducteur, devant exécuter une autre tâche pendant la phase de délégation (par exemple répondre à un appel téléphonique, envoyer un mail, etc.), est moins attentif à la route et que son temps de réaction augmente en présence d’incidents à gérer.
Le protocole expérimental
Dans une première phase du projet, les participants ont été placés dans un simulateur de conduite statique. L’étude a porté sur une soixantaine de conducteurs. La procédure expérimentale implique 4 groupes indépendants, chacun des groupes étant associé à une durée de période autonome (5, 15, 45, et 60 minutes). Les participants sont équipés avec des outils de mesures physiologiques et oculométriques dans le but d’évaluer l’état de somnolence et la stratégie visuelle au moment de la tâche de reprise en main.

Figure 2. Heatmaps illustrant les comportements oculomoteurs de deux participants, en période de conduite manuelle initiale (Panel A et C) et en période de conduite autonome (Panel B et D).
Une session se déroule ainsi : le participant conduit manuellement pendant 2 minutes au bout desquelles le système envoie un signal pour activer la fonction autonome. Après une période autonome variable, une requête de reprise en main est présentée. Les participants doivent aussitôt reprendre le contrôle du véhicule et réaliser une manœuvre d’évitement liée à l’apparition d’un événement dangereux dans l’environnement de conduite.
Pendant la période autonome, les participants s’engagent dans une tâche secondaire, laquelle consiste à regarder un film sur un écran positionné sur la droite du tableau de bord.
La durée d’autonomie influe peu, l’état de vigilance du conducteur beaucoup plus
L’hypothèse principale de cette étude était que plus la durée de la phase de délégation est longue, plus la capacité à détecter la nécessité de reprendre la main et la gestion de cette reprise en main seraient détériorée par le changement d’état du conducteur, notamment par l’apparition de signes de somnolence. Si à ce jour les résultats ne confirment pas cette hypothèse, plusieurs tendances ont néanmoins été rapportées.
La première est qu’il semble que la durée n’ait pas un effet linéaire sur la détérioration de la reprise en main, mais que cette détérioration est soumise à une dynamique plus complexe et probablement spécifique à l’individu plutôt que spécifique à la durée. En d’autres termes s’il est certain que la durée de délégation a un effet sur le conducteur, les dynamiques d’apparition de ces effets sont différentes selon les conducteurs.
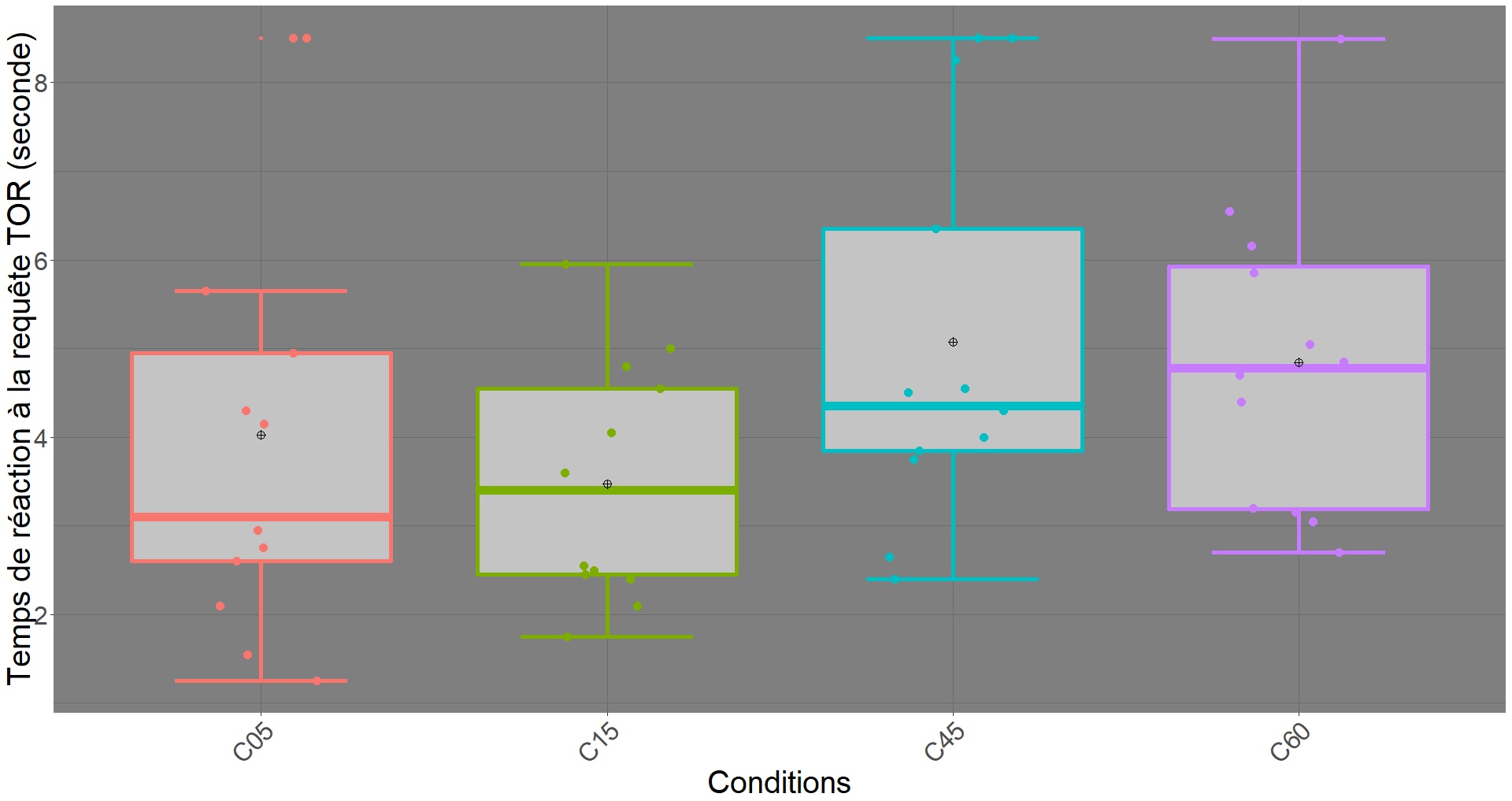
Figure 3. Boites à moustache illustrant la répartition de ces temps de réaction par condition de durée. On constate une variabilité interindividuelle importante avec un effet réel mais non proportionnel de la durée de délégation sur les temps de réaction à la requête TOR ("take-over request", requête de reprise de contrôle). Les barres d'erreur sont indiquées par des barres verticales aux extrémités des boites à moustaches. La barre horizontale à l'intérieur des boites correspond à la médiane par groupe, et les marqueurs noirs à la moyenne par groupe. Les "dots" de couleur représentent chaque temps de réaction par groupe dont la coordonnée en y correspond au temps de réaction mesuré, et en x son appartenance au groupe (fonction "jitter" appliquée pour la coordonnée x).
Deuxièmement, si on s’intéresse aux temps liés à la reprise en main, les différences que l’on observe sont liées à des processus de détection ou d’identification, plutôt qu'à des processus d’exécution. En effet, nous avons observé que les temps de premier regard variaient de façon importante, et qu’ils sont fortement influencés par la stratégie de contrôle visuel de l’individu. Cette stratégie est elle-même déterminée par l’individu, son état de somnolence, ou contrainte par une tâche secondaire (ce qui était le cas ici).
A ce stade, la caractérisation de la vigilance du conducteur et de l’attention qu’il porte à la conduite, qu’elle soit manuelle ou autonome, apparaît comme essentielle, surtout avec le niveau 3. Bien entendu, l’impact de la baisse de la vigilance, ou de l’apparition de la somnolence, comme une des premières causes d’accidents mortels, concerne surtout la conduite manuelle.
Cependant, dans le contexte de la voiture «autonome », qui est un nouvel outil et espace de conduite, cette notion est amenée à évoluer. En effet, à terme, la voiture autonome autorisera spécifiquement le conducteur à abandonner totalement le contrôle tout en restant actif sur d’autres tâches. Il faudra cependant s’assurer, lors du transfert de contrôle du véhicule vers le conducteur, que celui-ci est bien à même de reprendre la main rapidement et en toute sécurité.
L’analyse de l’influence de toutes les tâches secondaires potentiellement autorisées dans un habitacle autonome sur le comportement du conducteur et de sa gestion du véhicule quand cela est nécessaire semble particulièrement difficile. En effet, la variabilité existante chez les participants dans notre étude, au regard d’une tâche censée être passive comme le visionnage d’un film, pose question sur notre capacité à développer des modèles précis de prédiction capable de généraliser à d’autres comportements dans l’habitacle. Cela rend la gestion du mode 3 particulièrement délicate, en imposant un monitoring de l’état du conducteur.
Pour conclure, si l’on veut pouvoir fournir aux constructeurs automobiles et aux législateurs des recommandations qui préservent la santé et la sécurité des usagers quant à l’utilisation de ces nouvelles technologies, il faut peut-être accepter qu’il ne puisse pas y avoir d’étapes intermédiaires entre une conduite manuelle assistée (niveaux 2-3) et un mode d’autonomie totale (niveau 5).
