A bord d’un véhicule autonome, le conducteur doit rester vigilant alors même qu’il se pense délesté d’une obligation de concentration.

Archives 2017
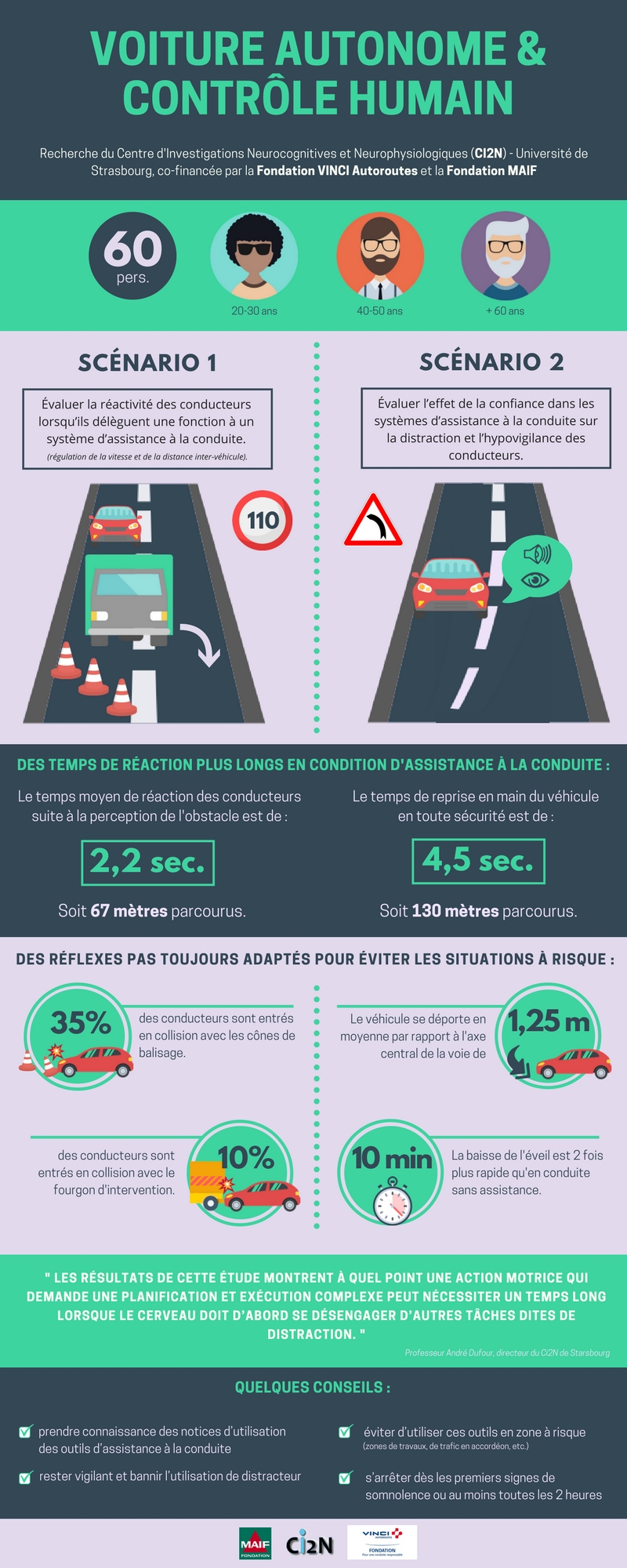
Le passage de relais entre machine et homme, en cas d’urgence, reste un point délicat : quel que soit le système d’assistance, les temps de réaction sont plus que doublés entre une conduite avec ou sans assistance.
En cas de désactivation d’un système de maintien dans la voie de circulation, le temps de reprise en main du véhicule en toute sécurité est de 4,5 secondes en moyenne, soit plus de 130 mètres parcourus, largement suffisant pour avoir un accident !
C’est ce qu’ont montré les chercheurs du Centre d'Investigations Neurocognitives et Neurophysiologiques (C12N) de Strasbourg à l’issue d’une étude, co-financée par la Fondation Vinci Autoroutes, sur l’aptitude des conducteurs à gérer efficacement la transition entre mode autonome et mode manuel.
Deux scenarii étudiés sur trois tranches d’âge
Les chercheurs ont testé sur simulateur de conduite 60 personnes, hommes et femmes, représentant trois tranches d’âge : jeunes, quadras et séniors. Deux scenarii ont été proposés en conduite sur autoroute. Dans le premier, il ne détecte pas un obstacle sur la route, à 110 km/heure . Dans le second, le système automatique se désactive et redonne la main au conducteur après un avertissement visuel puis sonore, à 130 km/heure . Dans les deux cas, il s’agit de voir si le conducteur réagit convenablement : suffisamment vite et sans écart de conduite susceptible de le mettre en danger.
Par ailleurs le conducteur est observé dans deux situations différentes : soit distrait par des questions, soit livré à lui-même, sans sollicitation extérieure.
L’hypovigilance entraîne de nouveaux risques
Le mode de reprise peut varier selon l’expérience de conduite. Par exemple les séniors actionneront plus facilement le volant quand les jeunes joueront des pédales. De même, les plus âgés sont moins sujets à l’endormissement que les jeunes. Mais globalement, quel que soit l’âge, le constat est le même pour tous : sans sollicitation extérieure, le conducteur tombe très vite en hypovigilance. Dans le scénario 2, si l’obstacle apparaît à 60 mètres du véhicule, près de la moitié des conducteurs testés le percute. Et dans le scénario 1, il faut en moyenne 4 secondes pour reprendre le contrôle manuel du véhicule. Alors même que l’arrêt du système d’aide à la conduite est signalé par une alerte visuelle puis sonore.
Ne pas fermer les yeux
En conclusion, quand le véhicule est en mode autonome, le conducteur doit impérativement rester attentif à la route. Et il ne faut pas hésiter à reprendre régulièrement la conduite manuelle pour rester éveillé. Côté constructeurs, il est nécessaire de revoir les signaux d’alerte indiquant la désactivation du mode autonome, pour les rendre encore plus prégnants.
Certes, les systèmes de conduite autonome réduisent l’erreur humaine et constituent donc une avancée indéniable pour la sécurité routière. Mais l’habitude de s’en remettre à la machine peut créer des accidents quand le système pèche. Il reste donc à trouver le moyen de stimuler efficacement l’attention des conducteurs, même quand ils délèguent le pilotage de la voiture à la machine.
Organismes de recherche et partenaires
Centre d'Investigations Neurocognitives et Neurophysiologiques (C12N)
Université de Strasbourg Bât 7121 Rue Becquerel 67087 Strasbourg
En partenariat avec La Fondation Vinci Autoroutes
Principaux intervenants
Responsable du projet : André DUFOUR
Date de début / Durée
2016 sur une durée de 18 mois
Documents à disposition
A voir aussi
Bénéfices et limites des voitures autonomes
Conclusions des tests sur route de 4 voitures autonomes...
Véhicules « autonomes » : en progrès mais pas fiables à 100 %
Les aides à la conduite sont de plus en plus performantes mais le véhi...